As a member of MIT's autonomous aquatic robotics team, Arcturus, I developed a ball launcher for the 2023 Roboboat competition. Using OnShape, I helped CAD various components and went through many iterations. As the project lead for the fabrication and testing phase, I helped organize meetings and design discussions to figure out how to improve the mechanism.
The mechanism has a rotating top that can hold the rubber balls. When it rotates, only one ball can be let through the opening that leads to the launcher. The launcher consists of a a motor that powers wheels to launch the ball. The launcher is mounted on a swiveling plate that rotates under the control of a servo. This design allows us to precisely control the trajectory of the ball.
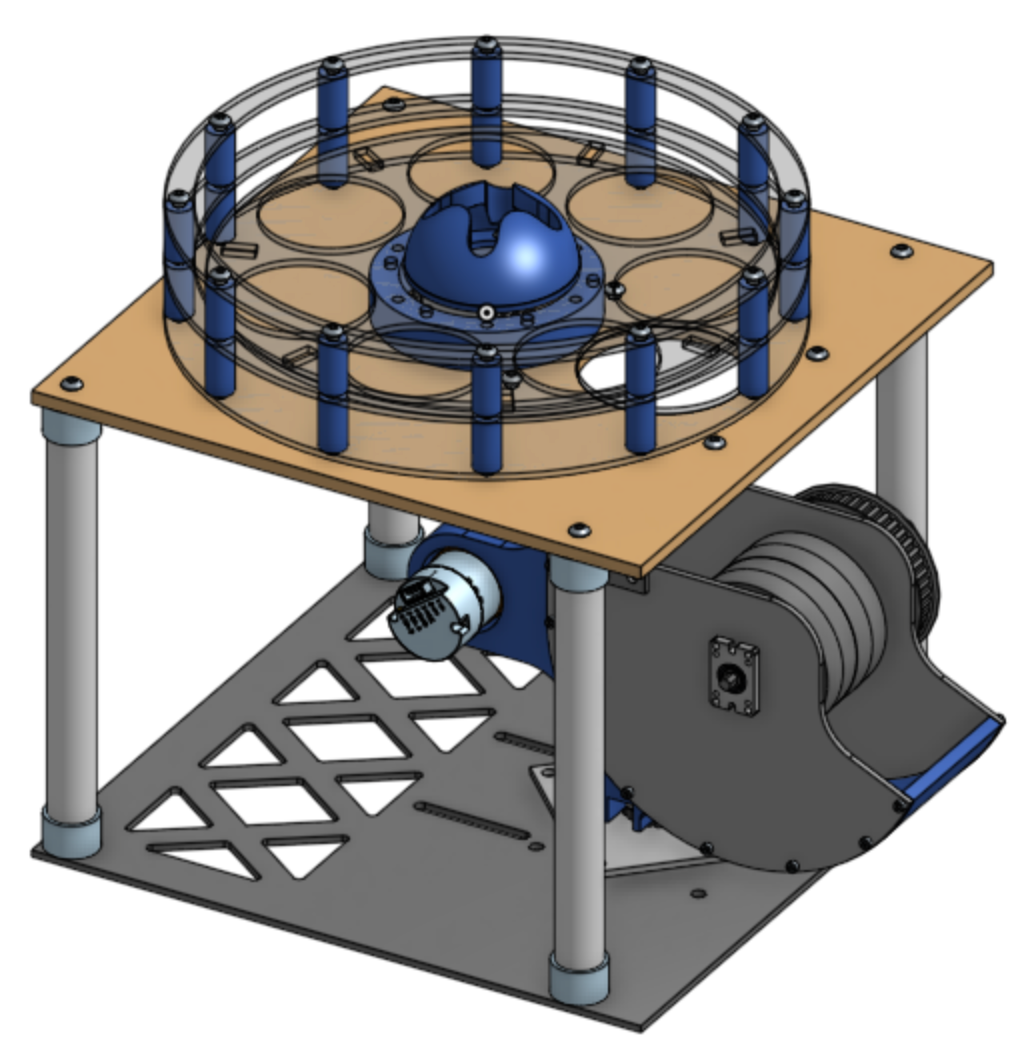
Some of the largest design changes included switching from 80/20 to PVC supports to reduce the mass of the mechanism, adding a Hall Effect Sensor to detect the position of the ball holder, and changing the position of the swivel mechanism. Some of these changes can be seen in the images below.

An earlier iteration of the ball launcher.